
工学部ロボット理工学科は2023年4月、理工学部AIロボティクス学科に改組しました。
日本初となるロボットOSを
採用した教育を実施。
ロボット開発のカギを握る新しいソフトウェアにも着目し、実践的にロボットの開発や製作、AI領域で活躍できる人材の育成を目指します。


01学科の概要
01学科の概要
卒業までに何が得られるの?
[学びのポイント]
POINT 1
ロボットの開発、設計、制御に関する知識に加え、理学や工学設計、プログラミングといった幅広い分野を学ぶことで実践的な力を養います。

POINT 2
ロボットのベースとなる人間や他の生物の構造、機能について学び、背景にある進化について考えながら、開発や改良などに生かせる知識を身につけます。
POINT 3
自己進化や自己修復機能を持つロボットの研究、トラブルへの対処やさらなる改良などにも対応できる学びを行い、最先端の知識や技術を修得します。
就職・キャリアデータ
取得が期待される資格
- ◎ITパスポート
- ◎基本情報技術者
- ◎応用情報技術者
- ◎プロジェクトマネージャ
- ◎システムアーキテクト
- ◎画像処理エンジニア検定ベーシック
- ◎データベーススペシャリスト
●は所定の単位を修得後に資格取得が可能なもの。()内は実務経験年数。
〇は受験(受検)資格の取得が可能なもの。()内は実務経験年数。
◎はその他、各学部・学科に関連する資格(受検資格を要しないもの)。
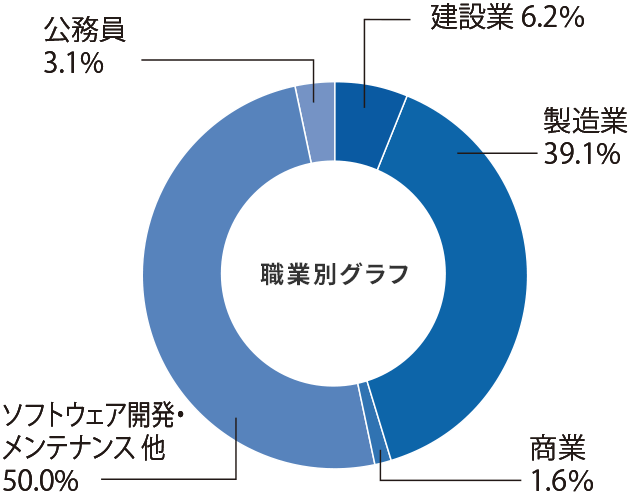
想定される主な進路
就職率 100%(就職者数 / 就職希望者数)
企業
- アイシン
- アイシン・ソフトウェア
- イビデン
- NTTデータ東海
- NTTデータフロンティア
- 川重岐阜エンジニアリング
- 川重テクノロジー
- CKD
- シンフォニアテクノロジー
- スズキ
- スター精機
- 住友電設
- 住友電装
- 住友理工
- セコムIS研究所
- 綜合警備保障(アルソック)
- ダイドー
- ダイフク
- 竹田設計工業
- デンソーウェーブ
- デンソーテクノ
- 東海理化アドバンスト
- 東海理化電機
- 東芝情報システム
- 東邦ガスエンジニアリング
- 東レエンジニアリング中部
- 豊田合成
- トヨタ情報システム愛知
- 豊通テック
- トライエンジニアリング
- 名古屋電気工業
- ニトリ
- 日本電産サンキョー
- パーソルR&D
- パナソニックプロダクションエンジニアリング
- 日立アイイーシステム
- 富士フイルムヘルスケアシステムズ
- 本田技研工業
- 三菱自動車エンジニアリング
- 三菱電機エンジニアリング
- 武蔵精密工業
- 明治電機工業
- メイテック
- 山崎製パン
- ユタカ技研
- 豊精密工業
官公庁
- 防衛省陸上自衛隊
- 一宮市役所
- 半田市役所
進学
- 中部大学大学院 ほか
STUDENT’S VOICE
学生の声
ロボットの専門的な学びに加えて、課外活動や副専攻でもスキルアップ。
1年次の「ロボット理工学Ⅱ」では、ロボットの設計から組み立て、プログラミングまでと、ロボット製作の全工程を学びました。またロボット理工学科では、ロボットを製造している企業の方などの学外の方と交流する機会も多くあります。その際に、経営や広報のスキルが必要だと感じたため、副専攻として経営総合学を学びました。将来は、相手を理解して橋渡しができるような開発者になりたいです。
02科目・カリキュラム
- 紹介しているカリキュラムは、2022年度の内容です。
- 全学共通教育科目・工学部共通教育科目は除きます。
ロボット開発や制御の基礎となる知識、技術を学びます。LEGOによるエンジニアリングデザイン、失敗例から原因と解決法を考える授業など実践的な学びを行います。
学科専門教育科目
| 理学 |
初等力学 |
|---|---|
| 工学設計 |
ロボット工学概論 |
| プログラミング |
ロボットプログラミング入門 ロボットプログラミングⅠ |
| 制御・信号処理 |
電気回路 |
| 生体・医療科学 |
生体の構造と機能 |
| 創成科目 |
ロボット理工学Ⅰ ロボット理工学Ⅱ リフレッシュ英語A リフレッシュ英語B 自主活動A 自主活動B |
| その他 |
ロボットの動作制御に関する実習や回路設計、プログラミングといった専門知識を学びます。またエンジニアとして必要な基礎知識の修得を目指します。
学科専門教育科目
| 理学 |
ロボット数学 材料力学 マルチボディダイナミクスⅠ |
|---|---|
| 工学設計 |
ロボット製図 材料科学 加工学 |
| プログラミング |
ロボットオペレーティングシステム ロボットプログラミングⅡ |
| 制御・信号処理 |
アナログ電子回路 デジタル電子回路 自動制御工学 |
| 生体・医療科学 |
|
| 創成科目 |
加工実習 プロジェクト演習A ロボット理工学演習A 英語コミュニケーションA 英語コミュニケーションB 自主活動A 自主活動B |
| その他 |
将ロボット制御や信号処理といった分野の最先端技術を学び、高度な資質を持つロボットエンジニアとしての素養を身につけます。
学科専門教育科目
| 理学 |
マルチボディダイナミクスⅡ |
|---|---|
| 工学設計 |
|
| プログラミング |
ロボットビジョン 機械学習 |
| 制御・信号処理 |
アクチュエータ工学 制御回路設計 デジタル信号処理 センサ工学 ロボットモーション ロボットインテリジェンス ロボットフロンティア |
| 生体・医療科学 |
ヒューマンロボットインタラクション 医療工学 |
| 創成科目 |
プロジェクト演習B プロジェクト演習C ロボット理工学演習B ロボット理工学演習C プロダクトデザインゼミナールA ゼミナールB 科学技術英語A 科学技術英語B 自主活動A 自主活動B |
| その他 |
ほぼ1年を通じて、自身で設定したテーマで卒業研究を進めます。研究成果や気づいた問題と解決策、新しい理論などを考察し実践力を磨きます。
学科専門教育科目
| 理学 |
|
|---|---|
| 工学設計 |
|
| プログラミング |
|
| 制御・信号処理 |
|
| 生体・医療科学 |
|
| 創成科目 |
自主活動A 自主活動B |
| その他 |
卒業研究 |
学ぶ科目の例
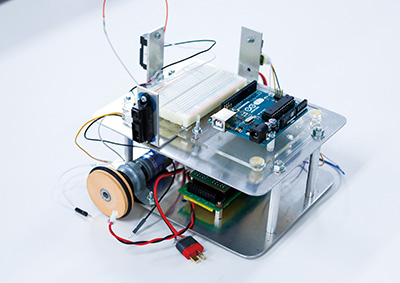
ロボット理工学Ⅱ
Arduinoマイコン、赤外線距離センサ、DCモータを使用して自律走行するロボットを製作します。3D CADで機体を設計して、アルミ板を加工して製作します。マイコンでのセンサ情報処理、モータ制御、自律走行の技術を学びます。

プロジェクト演習A・ロボット理工学演習A
ロボットオペレーティングシステム「ROS」の仕組みや通信方法を学び、ロボットソフトウェア開発の基礎を修得します。また、台車型移動ロボットを用いてセンシングや自律走行に関する知識と技術を学びます。
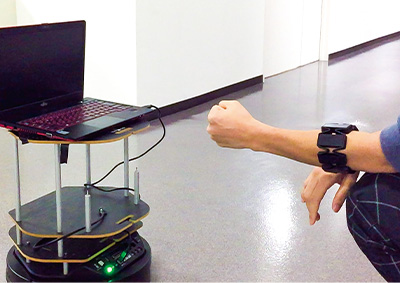
ロボット理工学演習C・ロボットインテリジェンス
筋電位センサを腕に巻いてロボットを操縦するシステムを構築したり、大型ロボットの高機能シミュレータを用いてアプリケーションの開発に取り組んだりしながら、ロボットを動かすための統合的な能力を修得します。
03学科の特長
工学技術を網羅する学びによって、
社会で活躍する実践的なロボットエンジニアを育成する
最先端分野であるロボットオペレーティングシステム(ROS)の専門的な学びを取り入れ、新領域でのロボット開発に貢献。
ROSを用いたアプリケーション開発技術の養成
ROSはロボット用オープンソースミドルウェアとして開発され、世界中で採用が進んでいます。大学などにおいてもROSを用いたロボットアプリケーション開発技術者の育成に取り組む動きが加速しつつある中、本学科では、カリキュラムにROS関連科目を設定し、専門的な学びを提供しています。また、幅広い学問領域の知識と経験を効率よく身につけられるようにカリキュラムを編成しており、社会課題を解決するロボットを開発するための素養が身につきます。ロボットエンジニアの基礎を成す知識、技術を修得する実習でも、ROSを柱とした学びが得られます。
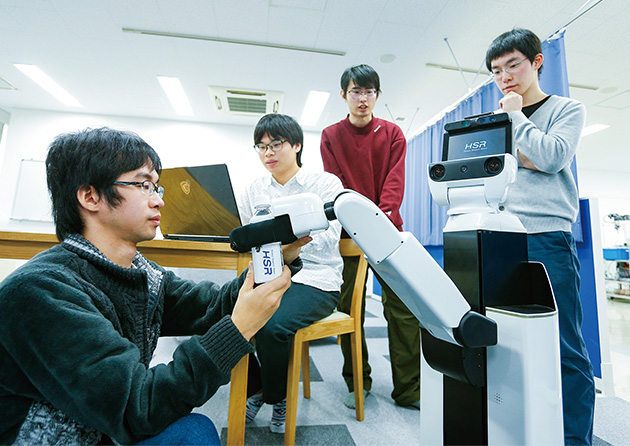
生活支援ロボットHSR(Human Support Robot)
トヨタ自動車が開発した人の生活を支援するサービスロボットHSRを用いて研究や講義を展開しています。本学科はHSRを用いて技術開発や研究を行う研究機関が参加するHSRコミュニティに加盟し、人間の生活を支援するためのロボット技術の開発、研究を進めています。HSRコミュニティを介して、開発した技術や成果を共有、相互利用することで、HSRを用いたロボット研究を加速させています。また、講義ではROSを介したHSRの制御からセンサを用いた周辺環境の認識など、ロボットアプリケーションを開発するための一連の技術を学び、アクティブラーニング形式でロボットアプリケーションを開発します。専門的な知識や技術を修得するほかに、ロボットエンジニアとして重要な課題を提案する力や問題を発見・解決するスキルを養います。

Turtlebot2
お掃除ロボット・ルンバと同様の2輪駆動機構を備えています。ノートPCやセンサを搭載することで、プログラムによる自律走行が可能な教育用ロボットになります。
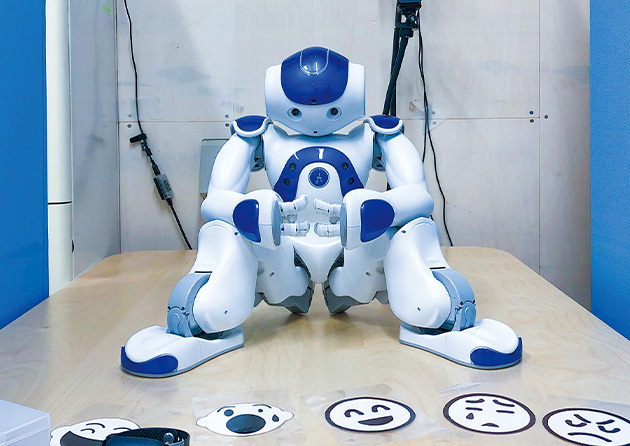
NAO
開発元がPepperと同じヒューマノイドです。高度な音声認識、発話機能、すぐれた開発環境とインタフェースを備えており、歩行やダンス等の動作を容易に作成できます。
研究室紹介

稲垣 圭一郎研究室
脳計測と信号処理により、視知覚や教育、情動ストレスに関わる脳情報処理を研究。
ヒトの脳計測と信号処理技術によって、脳活動と脳情報処理の規則性を分析し、視知覚のメカニズムの理解や教育、情報ストレスに関わる脳状態を理解する研究を進めています。情動ストレスに関わる脳情報処理を研究。

山内 悠嗣研究室
周囲環境を認識し、自らの判断で行動するロボット技術を研究。
センサ工学、ロボット工学、人工知能を基礎とし、賢いロボットを開発するためにセンサを介して外界を認識・理解する技術、ロボットの外界環境に適応して自律的に行動する技術の研究に取り組んでいます。
イ ジェリョン研究室
人の行動や感情を理解し、well-beingを実現してくれるソーシャルロボットを研究。
発達障害児や一人暮らしの高齢者など、さまざまな支援を必要とする人々を対象とし、日常生活の行動や感情の変化を分析し、その分析情報を基に、人をアシストするロボットについて研究をしています。