新たな人工知能(AI)技術を生み出し、ロボットへの実装をとおして、人とロボットの共存社会を実現。
人間は「判断・認識」と「行動」を組み合わせてさまざまな活動を行っています。
ロボットが自律して行動するためには、判断力が必要です。
一方で、AI技術は情報を認識・分析し、高度な判断を行いますが、そのために人間の行動や感情を分析することも必要です。
人とロボットの共存社会実現のために、新たな人工知能(AI)技術を生み出し、ロボットに実装できる力を持つ科学技術者を育成します。


01学科の概要
01学科の概要
卒業までに何が得られるの?
[学びのポイント]
POINT 1
AI系とロボット系の複数の履修モデルがあり、適性に合った履修モデルを選択可能。
POINT 2
AI、プログラミング、ロボット(機械、電気電子、制御)の幅広い分野の知識を修得できる。
POINT 3
4年間で幅広い分野の科目を学ぶ過程で、卒業後の進路/就職先をじっくり考えられる。
就職・キャリアデータ
取得が期待される資格
- ◎ITパスポート
- ◎基本情報技術者
- ◎応用情報技術者
- ◎プロジェクトマネージャ
- ◎システムアーキテクト
- ◎データベーススペシャリスト
- ◎CAD利用技術者
- ◎SIer検定
- ◎画像処理エンジニア検定ベーシック・エキスパート など
- [AI関連の資格]
- ◎G検定
- ◎E資格
◎はその他、各学部・学科に関連する資格(受験資格を要しないもの)。
主な進路(2021~2025年度卒業生※の実績)
- ※工学部ロボット理工学科での実績
就職率 100%(就職者数 50 / 就職希望者数 50)
企業
- 愛工機器製作所
- アイシン
- アイシン・ソフトウェア
- 愛知時計電機
- アドヴィックス
- 綜合警備保障
- 安藤鉄工
- イビデンエンジニアリング
- エスシー・マシナリー
- NTTデータ東海
- NTTデータフロンティア
- NTT西日本
- エムエイチアイロジテック
- オークマ
- 川重岐阜エンジニアリング
- 川本製作所
- 小島プレス工業
- CKD
- ジェイテクト
- シブヤ精機
- 新菱冷熱工業
- スズキ
- スター精機
- SUBARU
- 住友電設
- 住友電装
- 住友理工
- セコム
- ダイドー
- ダイハツ工業
- ダイフク
- 竹田設計工業
- 中電シーティーアイ
- デンソーウェーブ
- デンソーテクノ
- 東海理化
- 東芝産業機器システム
- 東芝情報システム
- 東邦ガスエナジーエンジニアリング
- 東レエンジニアリング中部
- 豊田合成
- トヨタ情報システム愛知
- 豊通テック
- 名古屋電気工業
- 日本電気
- ニデックインスツルメンツ
- 日本トムソン
- 半田重工業
- バッファロー
- 日立アイイーシステム
- 日立産業制御ソリューションズ
- 扶桑工機
- 本田技研工業
- マスプロ電工
- 三菱自動車工業
- 三菱自動車エンジニアリング
- 三菱電機エンジニアリング
- 三菱電機メカトロニクスエンジニアリング
- 三菱プラントエンジニアリング
- 武蔵精密工業
- ヤマザキマザック
- 山崎製パン
- リンナイ
- ローランドディー.ジー.
官公庁
- 名古屋市役所(技術系)
- 名古屋市交通局(技術系)
- 愛知県警察
- 一宮市役所
- 防衛省陸上自衛隊
- 半田市役所
進学
- 中部大学大学院
- 名古屋工業大学大学院
- 名古屋大学大学院 ほか
STUDENT’S VOICE
先輩の声

知識・技術・創造力で新しい価値を生むエンジニアに。
内定先:豊田合成株式会社
この学科の魅力は、実際にロボットに触れながら学べることです。プログラミングや電子回路、機械設計などの多様な分野を横断的に学ぶ中で、ロボットが動く仕組みを総合的に理解できました。ロボットの開発や実験は最初からうまくいくことは少なく、失敗した原因を分析し、改善していく姿勢が求められます。その過程で、論理的思考力や柔軟な発想力、そして粘り強さが養われていきました。将来は、中部大学で身につけた知識・技術と、「自ら考え、形にする力」を生かし、新しい価値を創出するエンジニアとしてグローバルに活躍したいです。
TEACHER’S VOICE
先生の声

画像認識や機械学習を実践的に学び、人とAIの「共進化」をリードする人材へ。
藤吉 弘亘 教授 FUJIYOSHI Hironobu
AI技術の基礎から応用までを学び、産業ロボットや自動運転のための画像認識、ディープラーニングの共同学習といったプログラムで実践的に知識を養います。社会課題を解決するために、AI技術はさらに進化していきます。AIを使うだけでなく「作る側」に必要な能力を修得し、ぜひ人とAIが「共進化」する未来を目指してください。
02科目・カリキュラム
- 紹介しているカリキュラムは、2026年度の内容です。
- 全学共通教育科目・理工学部教育科目は除きます。
学ぶ科目の例

深層学習
AIを支える基盤技術である深層学習(Deep Learning)の知識と技術を修得するために、講義とプログラミング演習をとおして実践的に学びます。本講義をとおして、AIに関する検定並びに資格の取得を目指します。
データサイエンス活用
実践的なデータサイエンスの知識と技術を修得するために、実データを取り扱いながら課題解決をする演習を行います。主に数理・データサイエンス教育強化拠点コンソーシアムが提供する実データと実課題のセットを活用し、プログラミング演習を通して実践的なデータサイエンスを学びます。

CAD・CAM・CAE
ロボットの構造を3次元CADで設計し、最適な加工手順を設定するCAM、どこが壊れやすいかを検査するCAEを学びます。例えば、実際に設計加工した構造にモーターを組み込んだものと、この授業をとおして検討した結果とを議論します。
03PICK UP
ロボティクス入門II: 設計から製作まで学べる導入科目
複数のセンサ情報から周囲を認識して、指定コースを自律走行する競技用のロボットカーの製作に4人のチームで協力して取り組みます。Arduinoマイコン、赤外線距離センサ、3軸加速度センサを搭載する2輪駆動の機体を製作します。メンバーで相談してロボットの構想を決め、3次元CADでシャーシを設計し、アルミ板を加工して機体を製作します。マイコンでのセンサ情報処理、モータ制御、自律走行のプログラミングを学びます。

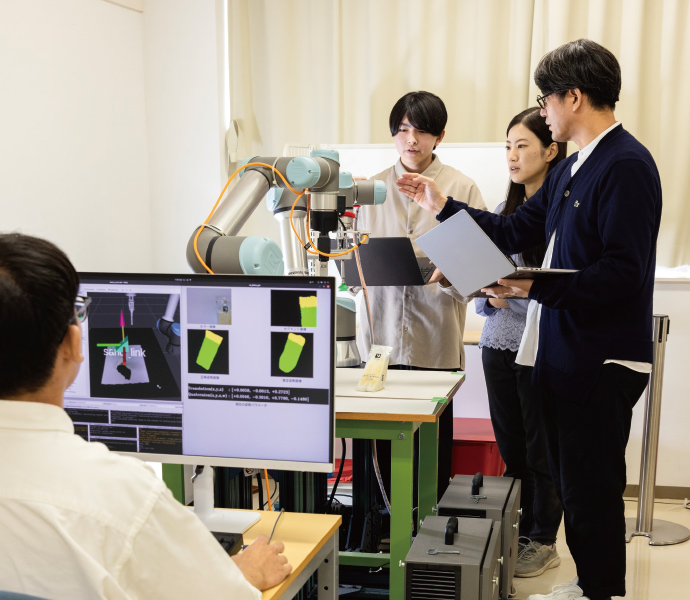
プロジェクト演習B: 協働型アームロボットを用いた実習
産業界で広く用いられつつある協働型アームロボットの制御に必要なソフトウェア(ROS2、MoveIt!、Gazebo)をインストールし、コントロールパネルを利用した定位置物体のピッキング、プログラミング制御による定位置物体のピッキング、カメラキャリブレーションと画像処理、深層学習による非定位置物体の位置検出、カメラ画像による非定位置物体のピッキングなどの演習を行います。
研究室紹介

梶田 秀司研究室
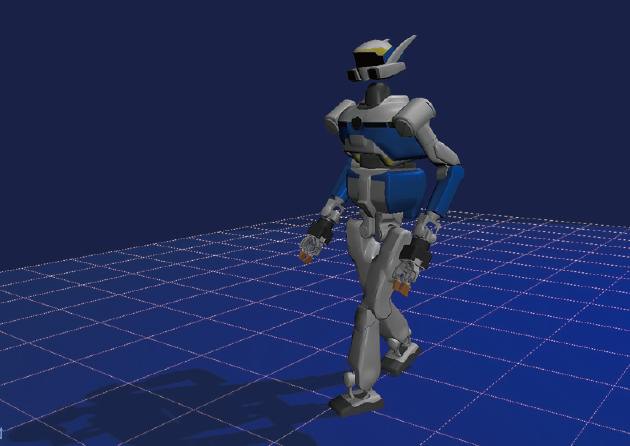
動的ロボット行動制御の研究
変化する環境の中で多様な行動を実現するAIロボットとその制御を研究しています。ヒューマノイドロボットの2足歩行制御の高度化や、人型に限らないさまざまな形状のロボットの協調行動など、次世代ロボットのための基礎研究に取り組んでいます。写真はトヨタ自動車が開発した生活支援ロボットHSRを用いて小型ヒューマノイドロボットの行動範囲を机の上から床面へ広げるための実験風景です。

梅崎 太造研究室
音・画像情報処理技術+計測技術+AI機能の応用
音声・画像情報処理技術と人工神経回路網の設計技術を応用した研究として、下記に示す研究を行っています。
(1)音認識に関する研究:カラオケ、発声・読話訓練、機械や車の音検査
(2)個人認証に関する研究:指紋・静脈・顔・3D顔・虹彩
(3)動体検知に関する研究:人・車・動物
(4)3D計測に関する研究:位相シフト・レーザー切断・光干渉法
(5)ロボットに関する研究:監視・教育・エンターテイメント・検査・搬送

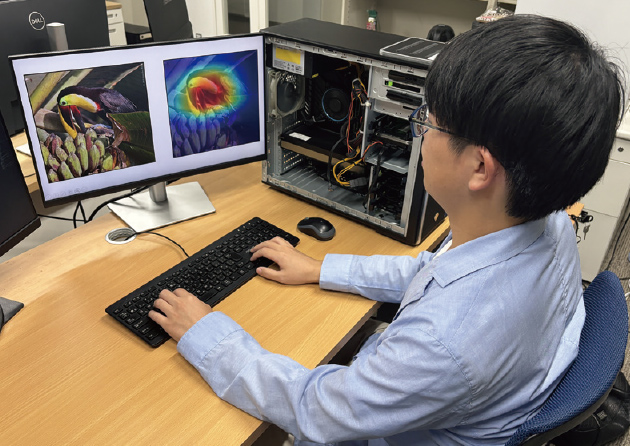
平田 豊研究室
動物や人の脳に学び人工脳を構築
動物や人の脳に関する脳・神経科学の知見に基づき人工脳を作っています。この人工脳を用いて動物のように柔軟な運動制御をロボットで実現することが目標です。当研究室では,行動中の人や魚の脳活動計測実験を行い、脳活動データに潜む情報をデータサイエンスを活用したデータ処理により抽出し、これに基づき脳の数理モデル(人工脳)を構築しています。また、この人工脳を計算機上に実装してロボットの制御実験を行なっています。

長坂 保典研究室
不整地作業用多脚ロボット開発
従来のロボットでは移動が難しい不整地を安定して歩行可能な多脚(主に6脚)ロボットを研究しています。動力学を計算可能なシミュレータ上でロボットの動きを確認して、その成果を実機ロボットの開発に活用しています。写真は製作途中の6脚ロボットについて、脚の構造や強度を確認する打合わせ中の一コマです。災害現場での人に代わる捜索活動、林業の現場での物資の運搬等への応用を目指しています。
長坂 保典研究室
不整地作業用多脚ロボット開発
従来のロボットでは移動が難しい不整地を安定して歩行可能な多脚(主に6脚)ロボットを研究しています。動力学を計算可能なシミュレータ上でロボットの動きを確認して、その成果を実機ロボットの開発に活用しています。写真は製作途中の6脚ロボットについて、脚の構造や強度を確認する打合わせ中の一コマです。災害現場での人に代わる捜索活動、林業の現場での物資の運搬等への応用を目指しています。